본 글은 2015년 12월 2일 17시 50분에 썼던 글이며 블로그 자료 이전으로 날짜만 갱신된 글입니다.

'CRIUS MWC MultiWii SE v2.5 멀티위 비행 제어보드 멀티콥터용 컨트롤러 ATMEGA 328P'에 멀티위 소스를 올리기 전에 멀티위 컨트롤러와 PC와 통신이 잘 되는지 확인해야한다.
※ 멀티위(www.multiwii.com)는 멀티로터 RC를 제어하기 위한 범용소프트웨어이다. 다시 말해 여러개의 날개가 달린 RC들을 제어할 수 있는 소프트웨어라는 말로 날개가 세 개인 트라이콥터부터 여덟개인 옥토콥터까지 다양하게 지원한다. 즉, 코딩하나 없이 쿼드콥터에 오픈소스 소트프웨어를 올리면 날릴 수 있다는 것이다. 멀티콥터에 대해 자세한 것은 펠콘샵을 참조(http://www.falconshop.co.kr/shop/goods/goods_view.php?goodsno=99979837)하는 것을 추천한다.
시리얼통신이 가능한지 확인하기 위해 우선 멀티위와 PC를 연결하고 PC의 장치 관리자에 가서 인식됬는지와 포트를 확인한다.

COM6에 연결되었다. 아두이노 IDE를 실행하자. 아두이노 IDE가 없다면 다운로드(https://www.arduino.cc/en/Main/Software)에 가서 받아 설치하면 된다.

포트를 COM6으로 맞춘다.

보드와 프로세서를 맞춘다. 아두이노 Pro 또는 Pro Mini로 해도 거의 동일하다.
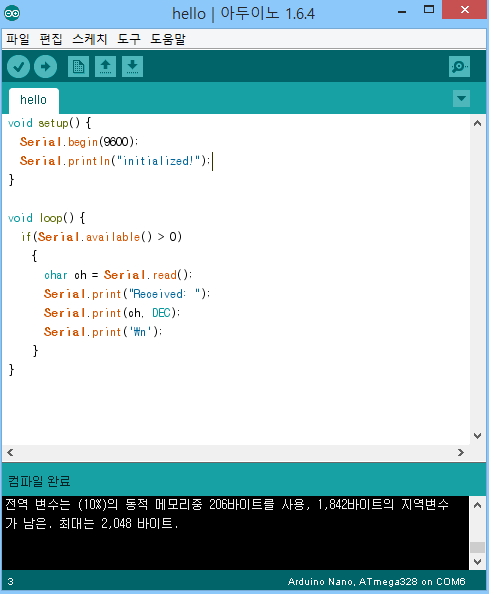
통신 테스트를 위한 코드를 작성하고 컴파일을 한다. 아두이노로 컴파일한 프로그램을 업로드 한다.

우측 상단의 돋보기 아이콘을 누르면 시리얼 통신을 할 수 있는 창이 나온다. 문자를 입력해서 통신이 되는 지 확인해본다. 시리얼통신을 열면 setUp() 에 작성한 코드가 실행되며 그 이후에 문자를 보내면 Received : 아스키번호 가 나타난다.
우리는 여기서 애를 좀 먹었는데 USB 케이블과 운영체제 호환 때문에 PC와 연결후 통신 테스트가 계속 실패하였다. 많은 시도 중에 통신이 성공했던 방법은 아래의 'FT232RL FTDI USB To TTL Serial Converter Adapter Module For Arduino' 모듈을 구매후 모듈의 FTDI핀과 멀티위의 FTDI 핀을 연결해서 5핀 USB 포트와 PC의 USB 포트를 연결하면 통신이 잘 되었다.
※ 참고로 아두이노는 UART와 FDTI를 동시에 사용하지 못 한다. 한 가지씩만 사용이 가능하다.
쿼드콥터 제작 시리즈(2015) 글 목록
- 캡스톤디자인의 주제로 쿼드콥터를 제작하게 되었다: https://engineeringcode.tistory.com/10
- 멀티위 쿼드콥터 부품 주문: https://engineeringcode.tistory.com/13
- 멀티위 컨트롤러와 PC를 연결해서 통신이 가능한 지 확인하자: https://engineeringcode.tistory.com/73
- 멀티위 컨트롤러에 멀티위를 업로드하자: https://engineeringcode.tistory.com/74
- 쿼드콥터를 조립하자: https://engineeringcode.tistory.com/351
- 쿼드콥터에 영상 송신장치를 달자: https://anisos.tistory.com/974
- 쿼드콥터의 배터리를 충전하는 방법: https://anisos.tistory.com/980
'사물인터넷(Internet of things, IoT) > 무인비행기(드론, 쿼드콥터)' 카테고리의 다른 글
| 5. 쿼드콥터를 조립하자 (0) | 2022.09.26 |
|---|---|
| 4. 멀티위 컨트롤러에 멀티위를 업로드하자 (0) | 2020.11.22 |
| 2. 멀티위 쿼드콥터 부품 주문 (0) | 2019.07.18 |
| 1. 캡스톤디자인의 주제로 쿼드콥터를 제작하게 되었다. (0) | 2019.07.13 |



댓글