728x90
반응형
본 글은 2015년 12월 3일 7시 26분에 썼던 글이며 블로그 자료 이전으로 날짜만 갱신된 글입니다.
멀티위 컨트롤러와 PC간에 시리얼통신이 잘 되는 지 확인을 했다면 이제 멀티위 컨트롤러에 멀티위를 업로드해야한다. 먼저 멀티위 프로젝트 사이트에 가서 멀티위를 다운 받는다.
멀티위 다운로드 : https://code.google.com/p/multiwii/
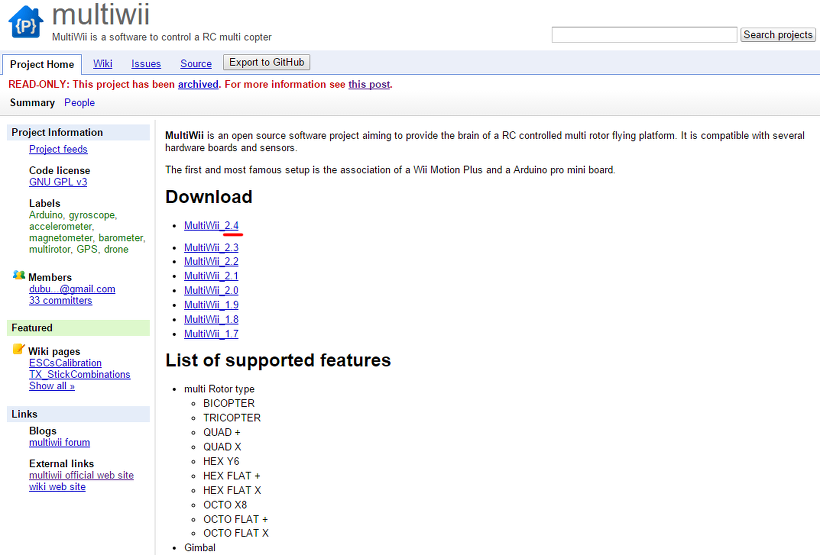
구글 프로젝트에 있는 멀티위 사이트에 가서 2.4버전을 클릭해서 다운받는다. 다운 받은 압축파일을 압축해제하면 루트에 아래와 같이 있다.
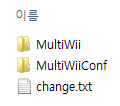
멀티위 소스가 있는 Multiwii 폴더와 멀티위의 상태를 모니터링하고 각종 설정을 할 수 있는 프로그램이 있는 MultiwiiConf 폴더가 있다.

멀티위 소스를 아두이노 IDE에서 열어서 수정이 필요한 부분을 수정후 업로드한다. 수정을 해야하는 부분은 최하단의 동영상을 참고하면된다. 멀티콥터의 날개수와 사용 중인 센서에 해당하는 코드를 주석해제한다.

멀티위의 상태를 모니터링하고 각종 설정을 할 수 있는 프로그램인 MultiWiiConf이다. 이것을 통해 칼리브레이션 등을 할 수 있다.
자세한 것은 위의 동영상을 참고하면 된다. 이제 쿼드콥터를 조립하면 날릴 수 있는 상태가 된다.
쿼드콥터 제작 시리즈(2015) 글 목록
- 캡스톤디자인의 주제로 쿼드콥터를 제작하게 되었다: https://engineeringcode.tistory.com/10
- 멀티위 쿼드콥터 부품 주문: https://engineeringcode.tistory.com/13
- 멀티위 컨트롤러와 PC를 연결해서 통신이 가능한 지 확인하자: https://engineeringcode.tistory.com/73
- 멀티위 컨트롤러에 멀티위를 업로드하자: https://engineeringcode.tistory.com/74
- 쿼드콥터를 조립하자: https://engineeringcode.tistory.com/351
- 쿼드콥터에 영상 송신장치를 달자: https://anisos.tistory.com/974
- 쿼드콥터의 배터리를 충전하는 방법: https://anisos.tistory.com/980
728x90
반응형
'사물인터넷(Internet of things, IoT) > 무인비행기(드론, 쿼드콥터)' 카테고리의 다른 글
| 5. 쿼드콥터를 조립하자 (0) | 2022.09.26 |
|---|---|
| 3. 멀티위 컨트롤러와 PC를 연결해서 통신이 가능한 지 확인하자 (0) | 2020.11.22 |
| 2. 멀티위 쿼드콥터 부품 주문 (0) | 2019.07.18 |
| 1. 캡스톤디자인의 주제로 쿼드콥터를 제작하게 되었다. (0) | 2019.07.13 |



댓글