본 글은 2015년 12월 4일 8시 1분에 썼던 글이며 블로그 자료 이전으로 날짜만 갱신된 글입니다.
멀티위 컨트롤러에 멀티위를 업로드 하였다면 이제 쿼드콥터를 조립해야한다. 쿼드콥터를 조립할 때는 각 부품이 소비하는 전력과 발생하는 열을 고려해서 조립해야한다. 우리가 구매했던 부품들은 이런 것이 다 고려되어 있는 것들이다.
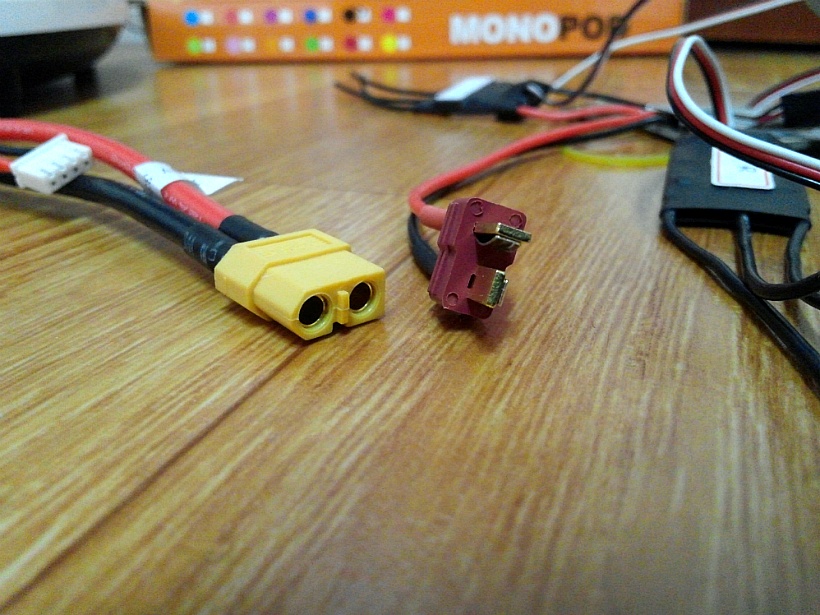
하지만 우리도 예상 못한 것이 있었는데 전원부 단자와 배터리의 단자가 완전히 다른 것 문제가 있었다. 분명히 주문은 제대로 했는데 말이다. 그래서 급한 나머지 우리는 구미의 전자상가와 공구상가를 들러서 단자들을 찾아보았으나 그 어느 곳에도 없었다. 가게 주인 말로는 이 단자는 수요가 거의 없기 때문에 사놓지를 않는다고 한다. RC샵에가서 찾으면 금방일텐데 하필 구미에 RC샵이 없을 때라...
구미에서 창업이 고민이신 분이 있다면 RC샵을 한번 해보는 것이 어떨가 싶다. 키덜트 위주로 운영을 하고 주말에는 동락공원에 나가서 홍보하고 카페와 블로그에 글을 열심히 쓴다면 꾸준히 수익이 날 수도 있다고 생각한다. 물론 이렇게 하면 무슨 사업이든 다 성공하겠지만 말이다.

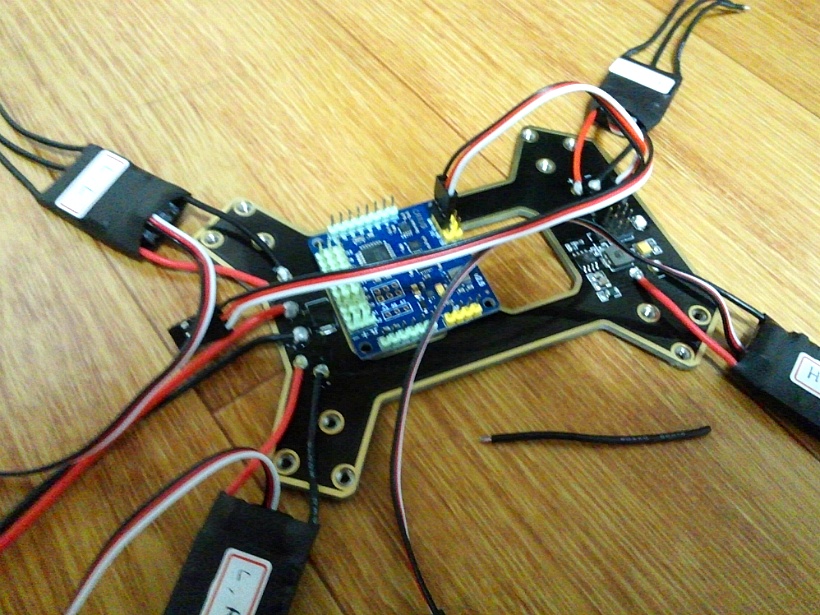
전원보드를 몸체 하단에 연결하고 날개를 방향에 맞춰서 조립한 다음 날개에 모터와 변속기를 연결하고 몸체와 조립한다. 변속기와 모터를 연결할 때 선이 3개인데 중앙의 선을 제외하고 좌우의 선을 어떻게 연결하는가에 따라서 모터가 도는 방향이 달라진다. 그런데 우린 어떤 방향으로 돌 것인지에 대한 예측이 안 되서 연결후 한 번 돌려보는 식으로 수작업으로 방향을 맞췄었다.

멀티위 컨트롤러에는 모터에 제어신호를 보내는 선과 무선 통신이 가능한 모듈을 연결하면 된다. 블루투스 모듈을 연결하면 플레이스토어에 있는 안드로이드앱을 다운 받은 후 바로 제어를 할 수 있다. 단, 시중의 아두이노에 연결가능한 블루투스 모듈은 보통 통신 가능 거리가 무척 짧고 200m 범위에 통신이 가능한 블루투스 모듈은 굉장히 고가인 문제가 있다.


우리는 APC220 을 쿼드콥터에 연결해서 제어를 했다. 제조사에서는 탁트인공간에서 반경 2,000m까지 제어가 가능하다고 한다. 우리는 반경 100m까지만 확인하였고 그 이상은 쓸 일이 없었다. APC220은 CP210X 계열의 드라이버가 필요하다. 안드로이드 폰에서 APC220에 시리얼통신을 가능하게 하는 USB시리얼드라이버는 ecgtheow님의 usbseriallib에 있다. 이 드라이버를 활용해서 안드로이드 앱을 만들면 된다. 앱이 정리되는대로 샘플앱을 하나 올려 보겠다.
USB시리얼드라이버 Github 주소 : https://github.com/ecgtheow/usbseriallib


우리 팀의 가장 큰 실수는 모터를 4셀용으로 주문하고 배터리는 3셀로 사서 힘이 부족해서 제대로 날지를 못 했다. 모터만 3셀로 사면 제대로 날 텐데... 학교에서 지원이 나올 때는 재고가 없어서 구매하지 못 했고 지금은 그 과목이 종료되서 지원이 안 나온다. 이 쿼드콥터를 가지고 후속 개선을 할 사람이 있다면 날개 주변에 프로펠러 가이드를 달아줬으면 한다.
쿼드콥터 제작 시리즈(2015) 글 목록
- 캡스톤디자인의 주제로 쿼드콥터를 제작하게 되었다: https://engineeringcode.tistory.com/10
- 멀티위 쿼드콥터 부품 주문: https://engineeringcode.tistory.com/13
- 멀티위 컨트롤러와 PC를 연결해서 통신이 가능한 지 확인하자: https://engineeringcode.tistory.com/73
- 멀티위 컨트롤러에 멀티위를 업로드하자: https://engineeringcode.tistory.com/74
- 쿼드콥터를 조립하자: https://engineeringcode.tistory.com/351
- 쿼드콥터에 영상 송신장치를 달자: https://anisos.tistory.com/974
- 쿼드콥터의 배터리를 충전하는 방법: https://anisos.tistory.com/980
'사물인터넷(Internet of things, IoT) > 무인비행기(드론, 쿼드콥터)' 카테고리의 다른 글
| 4. 멀티위 컨트롤러에 멀티위를 업로드하자 (0) | 2020.11.22 |
|---|---|
| 3. 멀티위 컨트롤러와 PC를 연결해서 통신이 가능한 지 확인하자 (0) | 2020.11.22 |
| 2. 멀티위 쿼드콥터 부품 주문 (0) | 2019.07.18 |
| 1. 캡스톤디자인의 주제로 쿼드콥터를 제작하게 되었다. (0) | 2019.07.13 |



댓글